



华体会hth
电液伺服阀的应用场景_电液伺服阀维修操作程序
电液伺服阀由于其高精度和快速控制能力,除了航空航天和军事装备广泛使用的领域外,在机床、塑料、轧钢机、车辆等各种工业设施的开环或闭环的电液控制管理系统中。特别是系统要求高的动态响应、大的输出功率的场合获得了广泛应用。
(1)电液伺服阀的位置控制回路。图172所示为电液伺服阀控制的液压缸直线 (a)所示为其原理图,图172 (b)所示为其职能方框图。当系统由指令电位器输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向液压缸3供油,驱动负载到预定位置,反馈电位器(位置传感器)检测到的反馈信号与输入指令信号经伺服放大器1比较,使执行器精度运动在所需位置上。
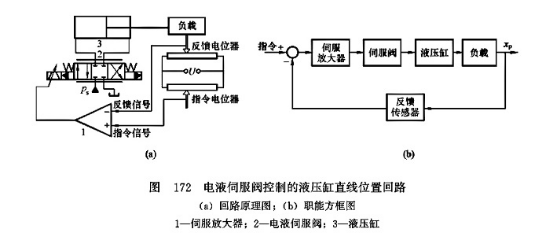
图173所示为电液伺服阀控制的液压马达直线 (a)所示为其原理图,图173 (b)所示为其职能方框图。当系统输入指令信号后,由能量转换放大,液压源的压力油经电液伺服阀2向液压马达3供油,齿轮减速器4和丝杠螺母机构5将马达的回转运动转换为负载的直线运动,位置传感器检验测试到的反馈信号与输入指令信号经伺服放大器1比较,使负载精度运动在所需位置上。
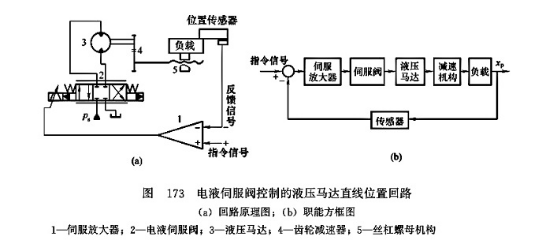
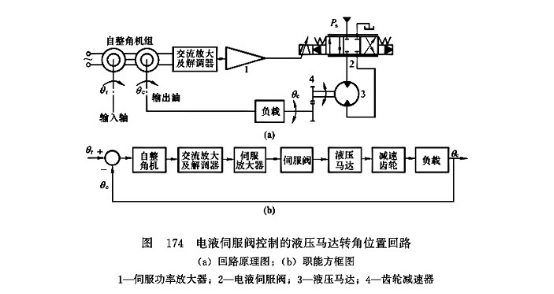
图174所示为电液伺服阀控制的液压马达转角位置回路,图174 (a)所示为其原理图,图174 (b)所示为其职能方框图。它采用白整角机组作为角差测量装置(3根线表示定子绕组的引出线根线表示转子绕组的引出线,通过圆心的点画线表示转轴),输入轴与发送机轴相连,输出轴与接收机相连。自整角机组检测输入轴和输出轴之间的角插,并将角差转换为振幅调制渡电压信号,经交流放大器放大和解调器解调后,将交流电压信号转换为直流电压信号,再经伺服功率放大器l放大,产生一个差动电流去控制电液伺服阀2,液压能量放大后,液压源的压力油经电液伺服阀2向液压马达3供油,马达通过齿轮减速器4驱动负载作回转运动,经上述反馈信号与输入指令信号的比较,使负载精确运动在所需转角位置上。
(2)电液伺服阀的速度控制回路。图175所示为利用电液伺服阀控制双向定量液压马达回转速度保持一定值的回路,图175 (a)所示为其原理图,图175 (b)所示为其职能方框图。当系统输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向双向液压马达3供油,使液压马达驱动负载以一定转速工作;同时,测速电动机(速度传感器)4的检测反馈信号uf与输入指令信号经伺服放大器1比较,得到的误差信号控制电液伺服阀的阀口开度,从而使执行器转速保持在设定值附近。
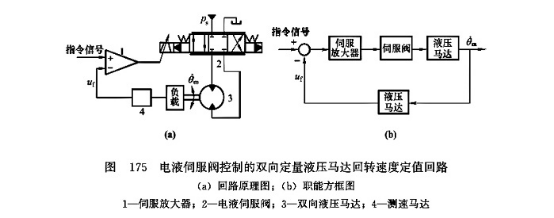
图176所示为开环变量泵控制的液压马达速度回路,图176 (a)所示为其原理图,图176 (b)所示为其职能方框图。双向变量液压泵5、双向定量液压马达6及安全溢流阀组7和补油单向阀组8组成闭式油路,通过改变变量泵5的排量对液压马达6调速。而变量泵的排量调节通过电液伺服阀2控制的双杆液压缸3的位移调节来实现。执行元件及负载与电液伺服闷控制的液压缸之间是开环的。当系统输人指令信号后,控制液压源的压力油经电液伺服阀2向双杆液压缸3供油,使液压缸驱动变量泵的变量机构在一定位置下工作;同时,位置传感器4的检测反馈信号与输入指令信号经伺服放大器1比较,得出的误差信号控制电液伺服阀的阀口开度,从而使变量泵的变量机构即变量泵的排量保持在设定值附近,最终保证液压马达6在希望的转速值附近工作。
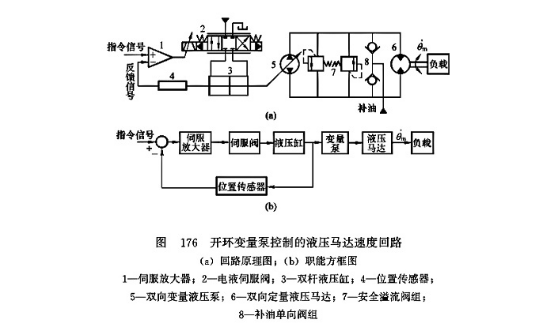
图177所示为闭环变量泵控制的液压马达速度回路,图177 (a)所示为其原理图,图177 (b)所示为其职能方框图。其中油路结构与图176所示开环变量泵控制的液压马达速度回路基本相同,所不同的是在负载与指令机构间增设了测速电动机(速度传感器)9,从而构成一个闭环速度控制回路。因此其速度控制精度更高。

(3)电液伺服阀的力和压力控制回路。图178 (a)所示为电液伺服阀的力控制回路.油源经电液伺服阀2向双杆液压缸3供油,液压缸产生的作用力施加在负载上,力传感器4的检测反馈信号与输人指令信号经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持负载受力的基本恒定。图178(b)所示为维持双杆液压缸两腔压力差恒定的控制回路,当电液伺服阀2接受输入指令信号并将信号转换放大后,使双杆液压缸3两腔压力差达到某一设定值。缸内压力变化时,液压缸近旁所控制的压差传感器5的检测反馈信号与输人信号指令经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持液压缸两腔压差的基本恒定。图178(c)所示为电液伺服阀的力和压力控制回路的职能方框图。
(4)电液伺服阀的液压缸同步控制回路。图179所示为利用电液伺服阀放油的液压缸同步控制回路。分流阀6用于粗略同步控制,再用电液伺服阀5根据位置误差检测器(差动变压器)3的反馈信号进行旁路放油,实现精确的同步控制。该回路同步精度高(达0.2mm),可自行消除两缸位置误差;伺服阀发生故障时仍可实现粗略同步。伺服阀可采用小流量阀实现放油,但成本比较高,效率较低,适用于同步精度要求比较高的场合。
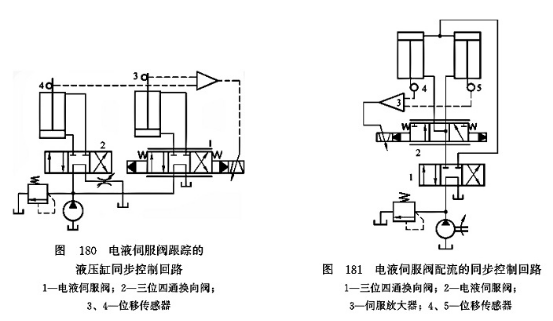
图180所示为利用电液伺服阀跟踪的液压缸同步控制回路。电液伺服阀1控制阀口开度,输出一个与换向阀2相同的流量,使两个液压缸获得双向同步运动。该回路同步精度高,但价格较贵。适用于两液压缸相隔较远,有要求同步精度很高的场合。
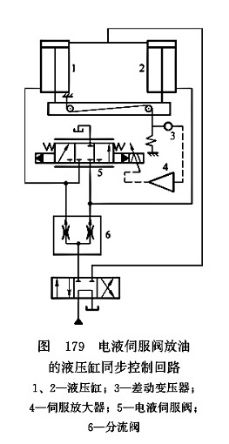
图181所示为利用电液伺服阀配流的同步控制回路。电液伺服阀2根据位移传感器4和5的反馈信号持续地调整阀口开度,控制两个液压缸的输人或输出流量,使它们获得双向同步运动。该回路的特点与图175所示回路相同。
调整:将新更换的部件来安装,接着进行调整,确保电液伺服阀的动作和压力等参数符合要求。
在进行电液伺服阀维修操作前,需要对操作的人进行安全培训和液压系统的排空、排气工作。同时,需要用符合相关规定的工具和材料,避免损坏电液伺服阀和液压系统。
1、上下游直管段对超声波流量计测量准确度的影响 时差法超声波流量计标定系数K是雷诺数的函数,流体从层流过渡到紊流,流速分布不均匀,标定系数K将产生较大的变化,从而引起测量准确度下降,根据要求,换能器应安装在上游直管段为10D,下游直管段为5D的位置,对于上游存在泵、阀等 设备 时直管段的长度,要求‘距离紊流、震动、热源、噪音源和射线源越远越好’。如果换能器安装的地方的上游有泵、阀等 设备 ,要求直管段为30D以上。 因此,直管段长度是保证测量准确度的重要的因素。 2、超声波流量计安装管道参数设置对测量准确度的影响 管道参数设置准确与否,与测量准确度关系紧密。如果管道材质及尺寸的设置与实际管道尺寸不相符,将使理论管道流通截面
为什么买了精度这么高的钳表,还是测不准? 钳表作为电流测量的主要工具,是广大电气工程师手头使用率仅次于万用表的主要利器之一。但是对于琳琅满目的仪表型号,复杂多变的工控环境,到底该如何快速选择比较适合自己的哪一款呢? 日常的钳表选择,大家常规的一般是看是否交直流,是否标称精度够高,然而真实的操作中精度往往还是不够满意甚至不够稳定。其实影响精度的规格还有很多,安泰测试为大家一一介绍: 一、真有效值/平均响应值 真有效值是指在给定频率下(比如工频),如果电流的大小/振幅变化很大,此时真有效值是基于积分算法模拟计算,则可以把变化的电流都测量在内。而平均有效值是基于正弦波峰值的给定平均值计算,难以把超出部分更准确显示出来。 具备真
选择合适的电流测量仪器-钳表 /
在航天设备测试中,陀螺和加速度计测试是必不可少的重要组成部分。随着陀螺与加速度计精度水平的提高,测试过程中对其激励源-恒流源的精度要求慢慢的升高。本文给出了一种基于PXI总线的高精度恒流源设计,并已成功应用于很多航天型号的陀螺和加速度计测试中。 1 系统模块设计 如图1所示,系统通过PXI总线与上位机进行通信,本地总线与PXI总线通过PXI接口电路连接。PXI接口电路将PXI总线指令翻译成本地局部总线传给FPGA,通过FPGA将PXI总线传输给D/A进行转换,D/A转换后的电压经V/I转换为高精度电流输出给用户。 2 系统电路设计 2.1 PXI接口电路 面向仪器系统的PCI扩展PXI (
速度更快、分辨率更高的雷达传感器通过改善车辆的安全性和舒适的视野,有助于实现下一代驾驶辅助技术。如果全球投资商知道哪里将会赚钱,那么汽车领域那些了解并掌握颠覆市场三大趋势的人将成为赢家: 先进的驾驶辅助系统(ADAS)技术迅速普及,无人驾驶汽车(AV)最终会获准上路行驶 电气化 MaaS出行即服务概念正在挑战传统的个人拥有汽车观念 将特斯拉和福特的市值对比,能够准确的看出这些趋势的重要性;特斯拉每年生产的汽车不足400,000辆。特斯拉的策略以一系列创新为基础,包括电池牵引、无人驾驶和无人驾驶出租功能,以支持特斯拉的拼车服务。 福特汽车的大部分收入来自采用高功率内燃机的传统美国皮卡车。福特2017年的汽车产量
低延时,带你领略汽车的虚拟眼,雷达的魅力 /
网联通讯联合实验室28日在北京发布高精度车用北斗芯片,达到米级定位精度、3秒钟快速定位,这在某种程度上预示着我国汽车将全方面进入米级导航时代。 网联通讯联合实验室是在中国汽车联网产品认证联盟主办的“米级快速定位北斗芯片联合发布会”上发布这些芯片的。中国汽车联网产品认证联盟表示,年内将推动北斗米级快速定位终端普及应用,引领我国汽车产业快步迈向精准服务时代。 米级快速定位北斗芯片批量发布 由中国汽车联网产品认证联盟推动组建的网联通讯联合实验室,由珠海全志科技股份有限公司、杭州中科微电子有限公司、福州瑞芯微电子股份有限公司、展讯通信有限公司、联发科技股份有限公司等重点芯片企业与千寻位置网络有限公司合作组建。 网联通讯联合实验室此次发布的产品有:全
非常见问题第191期:负载点DC-DC转换器解决电压精度、效率和延迟问题 问题: 为什么使用DC-DC转换器应尽可能靠近负载的负载点(POL)电源? 答案: 效率和精度是两大优势,但实现POL转换需要非常注意稳压器设计。 接近电源。这是提高电源轨的电压精度、效率和动态响应的最佳方法之一。负载点转换器是一种电源DC-DC转换器,放置在尽可能靠近负载的位置,以接近电源。因POL转换器受益的应用包括高性能CPU、SoC和FPGA——它们对功率级的要求都慢慢的升高。例如,在汽车应用中,高级驾驶员辅助系统(ADAS)——例如雷达、激光雷达和视觉系统——中使用的传感器数量在稳步倍增,导致需要更快的数据处理(更多功
、效率和延迟问题 /
引言 随着现代科学技术的发展,频率及时间的测量以及它们的控制技术在科学技术各领域,特别是在计量学、电子技术、信息科学、通信、天文和电子仪器等领域占有逐渐重要的地位。从国际发展的趋势上看,频率标准的准确度和稳定度提高得非常快,几乎是每隔6至8年就提高一个数量级。本系统采用DSP的数值控制方式是目前设计控制管理系统的发展的新趋势,这种基于DSP的控制管理系统能够用软件实现复杂的算法,而不需要复杂的模拟电路,具有软硬件模块化、测量功能可重组/可选择的特点。该系统采用TI公司推出的150MHz高速解决能力的高精度定点数字信号控制器TMS320F2812芯片,其丰富的片内资源可以大幅度简化硬件电路的设计,有利于提高系统的可靠性,其高效的32位C
随着数字通信系统的发展,高速数字处理系统对 模拟 信号和数字信号之间的转换要求慢慢的升高。目前高性能模数转换器(ADC)的两大主要发展趋势是高速、中低精度ADC和低速、高精度ADC。前端T&H 电路 通常是ADC设计的一个关键,其动态精度的好坏直接影响着ADC性能的优劣。 1 开环T&H电路 在超高速ADC的设计中,一般多采用全并行FLASH结构或者是时间交织结构。 而在时间交织结构中,其前端T&H电路则能够准确的通过设计的基本要求分别采取了开环或者闭环结构。闭环结构速度较低,精度较高,而开环结构速度高,但本身精度较低。本设计中采用后者。 T&H电路的失要来源于非线性MOS 开关 电阻 、 开关 寄生 电容 和开关电荷注入。MOS开关
系统设计指南 (埃利斯)
射频调制激光雷达
电动汽车电池管理系统(BMS)simulink完整模型(含SOC、主动均衡等算法)
有奖征文:邀一线汽车VCU/MCU开发工程师,分享开发经验、难题、成长之路等
这两天,研究人员又发现M系列芯片存在一项新的安全漏洞,这个漏洞就比较离谱了,不仅不需要root后提权到kernel,影响面会非常大,而且想要修复,就要拖垮芯片的工作性能。...
Edge Impulse增加对NVIDIA TAO和Omniverse的支持
适用于边缘设备的 Edge Impulse 机器学习平台发布了一套在 NVIDIA TAO Toolkit 和 Omniverse 上开发的新工具,为基于 Arm Corte ...
那么,第五代至强是怎么来实现这样的AI 性能提升的?日前,英特尔资深技术专家揭秘了其内部的技术细节。...
在 NVIDIA GTC 2024上,恩智浦和 NVIDIA 宣布了一项新的合作,使 NVIDIA 经过训练的 AI 模型可以通过 eIQ 机器学习开发环境部署 ...
2024年3月22日 – 专注于推动行业创新的知名新品引入 (NPI) 代理商™贸泽电子 (Mouser Electronics) 很高兴宣布赞助第22届“创造未 ...

站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科
